-
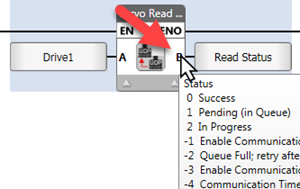
Servo, Axis Motion Status:
These functions have an output for status indications.
UniLogic provides:
Servo Functions
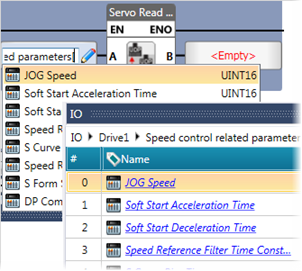
These are located under the COM: Servo menu in the Ladder tool box. Use these to modify a servo drive's configuration, or to read / write parameters from and to the drive.
Motion Control Functions (MC Functions)
These are located under Motion Control in the Ladder toolbox. These are PLCopen-compliant functions that you use to operate the servo, and implement control of multiple axes.
These functions may be considered as groups. They are listed under COM: Servo in the Ladder Toolbox.
|
|
|
|
Group |
Function Name |
Purpose |
|
Servo Read Configuration |
Reads (uploads) Configuration file data from the servo drive to the drive struct |
|
|
Servo Write Configuration |
Writes all of the data in the drive struct to the drive |
|
|
Servo Load Configuration from File |
Loads servo drive Configuration data from the file specified in the function in UniLogic to the servo drive struct |
|
|
Servo Store Configuration to File |
Stores the last loaded servo drive Configuration of the drive specified, to the Configuration file specified in the function |
|
|
Write Modified Parameters |
Writes only the servo drive data that has been modified to the drive and saves the successfully modified values to the struct |
|
Group |
Function Name |
Purpose |
|
Servo Read Parameter Direct |
Read a value from the servo drive, directly from the specified parameter |
|
|
Servo Read Parameter InDirect |
Read a value from the servo drive, indirectly, using a tag to store the parameter name (group and index) |
|
|
Servo Write Parameter Direct |
Write a value from the servo drive, directly from the specified parameter |
|
|
Servo Write Parameter InDirect |
Write a value from the servo drive, indirectly, using a tag to store the parameter name (group and index) |
|
|
|