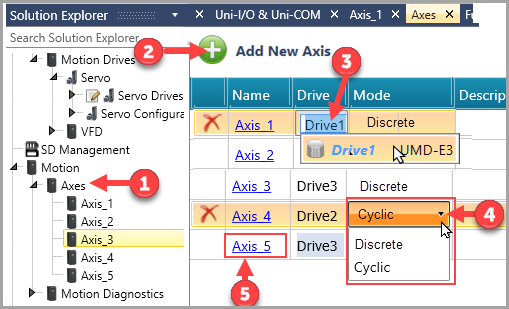
In the Solution Explorer, click Motion>Axes.
Click Add New Axis; note the pop-up will offer you the option to import Ready-made Motion code; you may do this now or later by right clicking Motion in the Solution Explorer.
UniLogic adds an axis.
Note the option to add a virtual axis.
Click Drive and select your drive.
Click Mode to select Discrete or Cyclic.
Note that Cyclic is intended for use with EtherCAT Multi-Axes functions.
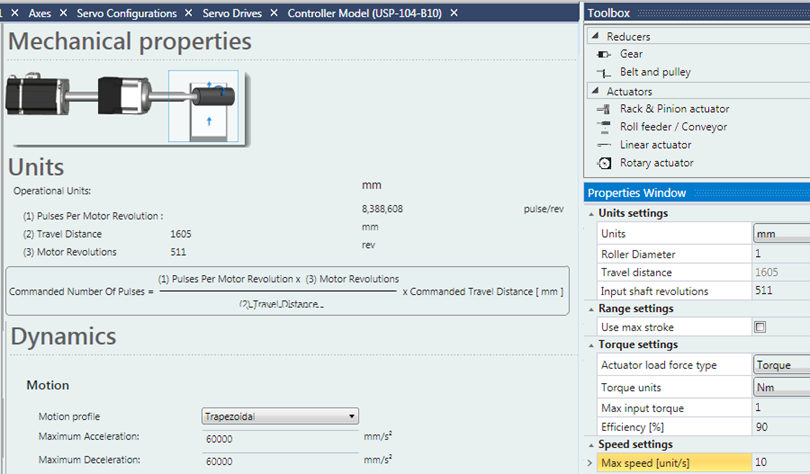
Click the Axis to open its Configuration.
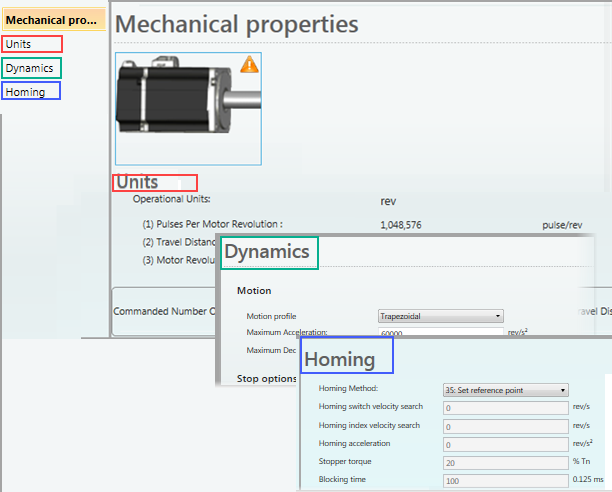
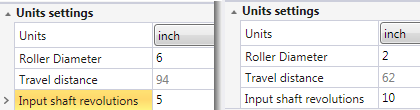
The Configuration is organized into groups.
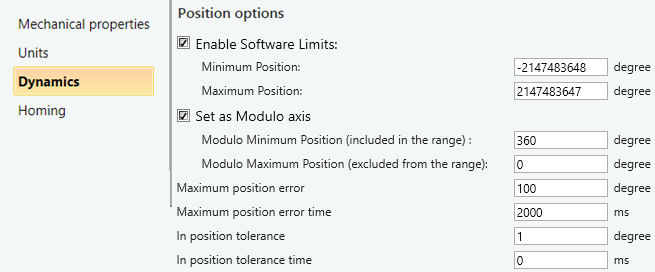
Click a group - Mechanical properties, Units, Dynamics, Homing - to view and edit its parameters.