-
EtherCAT Master COM modules are compatible with UniStream PLC Standard and Pro models, as well as the Built-in US15-B10-B1 modelBuilt-in US15-B10-B1 model.
The EtherCAT Master COM module must be placed directly next to and connected to the CPU; it may be followed by other modules.The US15-B10-B1 is the first UniStream Built-in PLC model to offer full support for EtherCAT master functionality, including both discrete I/O control and multi-axis EtherCAT motion control capabilities.
This model features a flexible I/O architecture with no built-in I/O points, allowing you to create a customized configuration that precisely meets your application requirements
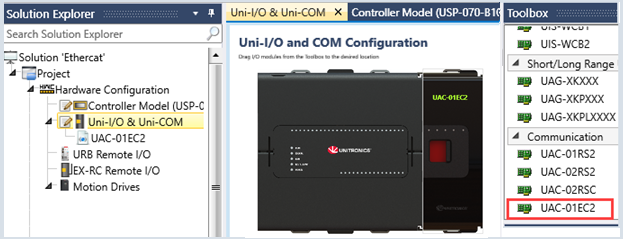
Note that to enable the EtherCAT Master Module (UAC-01EC2), you must first add the I/O Adapter (UAG-BACK-IOADP).

-
Only one EtherCAT Master COM module may be used per CPU.
-
An EtherCAT Master COM module can act as a motion controller to build the Motion Profile. The Master can can control up to 8 discrete axes, or up to 4 discrete axes and up to 4 cyclic synchronous axes.
When an axis is set to cyclic mode, the EtherCAT master generates the motion profile at every cycle.