|
|
|
|
|
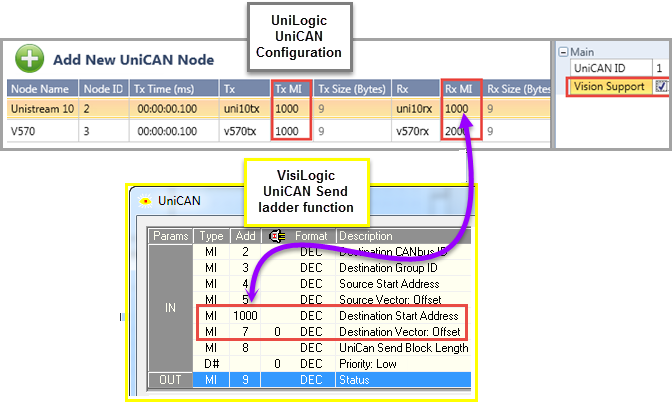
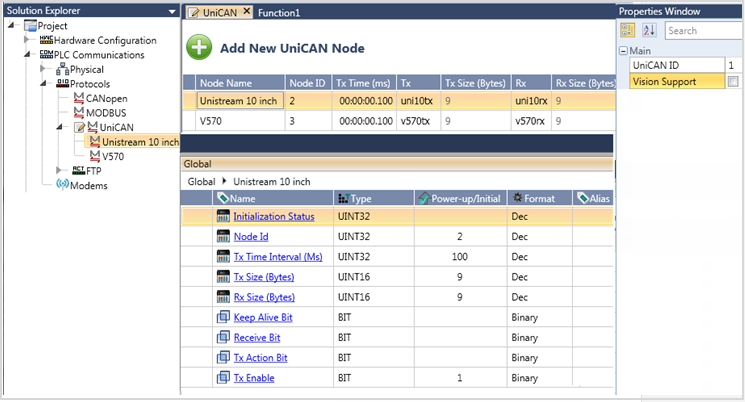
UniCAN ID
|
UINT32
|
This is the ID of this controller
|
|
Rx Counter
|
UINT32
|
The total number of Rx messages received by this controller
|
|
Tx Counter
|
UINT32
|
The total number of Tx messages sent by this controller
|
|
Rx Alive Counter
|
UINT32
|
The total number of Alive signals received by this controller
|
|
Tx Alive Counter
|
UINT32
|
The total number of Alive signals sent by this controller
|
|
Rx Error Counter
|
UINT32
|
This is the total number of errors received from all nodes by this controller, including: Message size mismatch, Message received from undefined node ID, MI received that is not defined in the Rx MI parameter
|
|
Tx Error Counter
|
UINT32
|
Total number of messages that could not be sent
|
|
Rx Alive Error Counter
|
UINT32
|
The total number of Alive errors received by this controller
|
|
Tx Alive Error Counter
|
UINT32
|
The total number of Alive errors sent by this controller
|
|
Alive Bitmap 1-31
|
UINT32
|
When a Keep Alive signal is not received from a specific node, the corresponding bit indicating the node ID turns ON. (Nodes 1-31)
|
|
Alive Bitmap 32-63
|
UINT32
|
When a Keep Alive signal is not received from a specific node, the corresponding bit indicating the node ID turns ON. (Nodes 32-63)
|